

The semiconductor industry has achieved extraordinary mastery in silicon signoff. Modern EDA environments can now optimize timing closure, physical verification, IR/EM behavior, routing density, thermal interaction, and increasingly even design-space exploration through AI-assisted implementation flows. Crossing the tapeout boundary is often treated as the moment convergence has been achieved.
However, a dangerous and increasingly expensive illusion has emerged: localized silicon convergence does not guarantee realized system convergence.
In advanced heterogeneous systems, a design that achieves perfect signoff may later become physically coupled to substrate warpage, thermal-current interaction, package deformation, runtime workload variation, PDN instability, aging effects, firmware adaptation, and operational environments that were never fully represented inside the original signoff assumptions.
The semiconductor industry has quietly entered a new engineering era where the dominant challenge is no longer simply building correct silicon. The larger challenge is preserving deterministic convergence after silicon enters the realization ecosystem.
This is the Silicon Realization Gap.
For decades, Design for Manufacturing (DFM) served as the semiconductor industry’s primary manufacturability assurance methodology. DFM was built for an era where packages were simpler, systems were less thermally dense, runtime behavior remained comparatively predictable, and silicon implementation stayed largely centralized. Within that environment, DFM successfully answered a critical question:
“Can this design be manufactured at scale?”
For many generations, that was sufficient.
But heterogeneous integration fundamentally changes the problem.
In modern 2.5D and 3D systems, localized thermal hotspots propagate into package behavior, substrate deformation alters impedance continuity, runtime workloads reshape thermal-current interaction, current-density redistribution perturbs EM margins, and operational aging gradually shifts convergence boundaries over time. A static signoff can no longer fully predict the long-horizon behavior of the realized heterogeneous system.
Manufacturability alone is no longer enough.
The challenge is no longer simply:
“Can we build the system?”
The challenge becomes:
“Can the system remain converged throughout operational life?”
As realization environments become increasingly heterogeneous, the limiting factor may no longer be implementation capability alone, but Governed Convergence Capacity — the organizational and technical ability to preserve deterministic convergence across continuously evolving realization environments.
One of the industry’s least discussed blind spots is the transition between silicon implementation convergence and realized heterogeneous system behavior. Modern realization environments now span a continuous System Realization Corridor including die, bumps, package, interposer, substrate, PCB, connector, thermal environments, manufacturing variation, qualification, firmware, runtime operational behavior, and fleet deployment.
Within this corridor, electrical, thermal, mechanical, manufacturing, and operational conditions continuously interact across fragmented organizational and tooling domains. A perturbation introduced in one region may propagate and amplify throughout neighboring domains. Thermal gradients alter resistivity, warpage perturbs SI/PI continuity, runtime workloads reshape package behavior, firmware adaptation changes operational conditions, and field aging shifts stability margins long after production release.
The corridor therefore becomes more than a physical propagation path. It becomes a governed realization corridor operating inside a bounded convergence envelope.
Deterministic behavior no longer emerges from isolated domain correctness alone. It emerges from preserving convergence continuity across the complete realization corridor.
Closing the Silicon Realization Gap therefore requires moving beyond static manufacturability assurance toward Governance for Lifecycle (GFL).
Unlike traditional DFM, which primarily acts as a pre-production signoff methodology, GFL functions as a continuous lifecycle-governance architecture. Its purpose is not merely ensuring that systems can be manufactured. Its purpose is preserving convergence continuity throughout the operational lifecycle of the realized system.
Within the GFL model, runtime observability, convergence-authoritative evidence, firmware adaptation, qualification behavior, bounded intervention, Fleet Learning, and admissibility-preserved operational refinement become active participants inside the convergence process itself.
The realized system is no longer treated as a static manufactured object. Instead, it becomes a continuously governed and admissibility-preserved convergence environment.
In traditional flows, signoff is often treated as a fixed point of correctness. However, heterogeneous systems do not operate at a single static point. They operate inside continuously evolving physical and operational conditions.
The System Realization Corridor must therefore be treated as a bounded convergence envelope.
Inside this envelope, runtime perturbations, thermal variation, package deformation, workload dynamics, firmware adaptation, and operational aging may occur without violating admissible convergence boundaries.
The objective of GFL is not eliminating all perturbation. The objective is preserving bounded operational convergence despite perturbation.
This distinction is critical because advanced systems increasingly require adaptation, refinement, observability continuity, and bounded intervention to remain operationally stable across long deployment lifecycles.
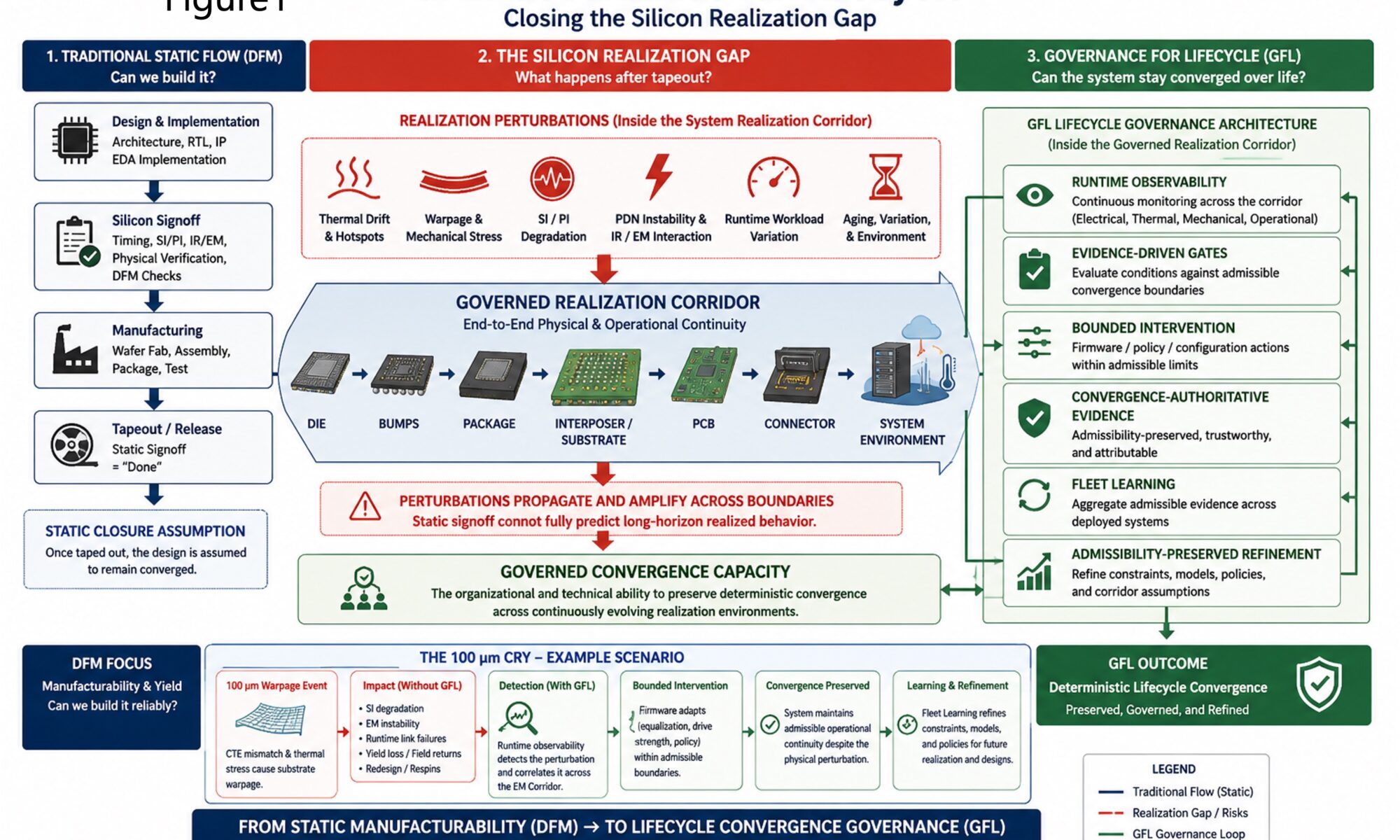
Consider a large-scale 2.5D package experiencing a 100 µm substrate warpage event caused by long-term thermal stress and CTE mismatch.
Within a traditional DFM-only environment, this event may eventually manifest as SI degradation, EM instability, runtime link failures, yield collapse, or field-return escalation. The conventional response becomes redesign, recalculation, or substrate respin.
Within a GFL-enabled realization environment, however, the same perturbation becomes a governed convergence condition.
Runtime observability infrastructure detects the physical perturbation. A causality framework correlates the mechanical deformation to measurable electrical penalties across the System EM Corridor. Firmware-level runtime governance applies bounded compensation through equalization, drive-strength adaptation, or operational policy refinement. The system preserves admissible operational continuity despite the physical perturbation.
The objective is not unconstrained autonomous optimization.
The objective is governed adaptive convergence.
The final transformation from static DFM to GFL occurs through Fleet Learning.
Fleet Learning within the SEGA-AI™ framework is not generic telemetry analytics. Its purpose is preserving causality continuity and operational refinement across large populations of deployed systems.
By collecting admissibility-preserved and convergence-authoritative evidence from deployed systems, GFL transforms localized operational monitoring into continuous convergence refinement.
Recurring thermal asymmetry, repeated warpage-related SI degradation, operational voltage instability, and runtime behavioral drift may refine package constraints, admissibility boundaries, firmware policies, System EM Corridor assumptions, and future realization-governance models.
The realization environment itself therefore becomes part of the convergence process.
The system evolves from static manufacturability to continuous lifecycle convergence governance as illustrates in Figure 1..

The semiconductor industry is entering an era where deterministic closure can no longer depend solely on isolated signoff methodologies. As heterogeneous systems become more thermally dense, more operationally dynamic, more physically coupled, and increasingly runtime-dependent, the future of advanced packaging may increasingly depend on realization continuity, governed adaptation, admissibility-preserved refinement, Fleet Learning, and lifecycle convergence governance.
Because ultimately, manufacturability alone does not guarantee deterministic system realization.
Also Read:
Closing the Reality Gap: A New Architecture for 1.8-Tb/s Chiplet Governance
Beyond Tool Interoperability: The Emerging Governed Convergence Problem in Semiconductor Design
Share this post via:



TSMC CoWoS versus Intel EMIB Semiconductor Packaging