

 Design for test (DFT) imposes various restrictions on the design so that the test automation tools (automatic test pattern approaches such as scan, as well as built-in self-test approaches) will subsequently be able to generate the test program. For example, different test approaches impose constraints on clock generation and distribution, on the use of asynchronous signals such as resets, memory controls and so on. If all the rules are correctly addressed then the test program should be complete and efficient in terms of tester time.
Design for test (DFT) imposes various restrictions on the design so that the test automation tools (automatic test pattern approaches such as scan, as well as built-in self-test approaches) will subsequently be able to generate the test program. For example, different test approaches impose constraints on clock generation and distribution, on the use of asynchronous signals such as resets, memory controls and so on. If all the rules are correctly addressed then the test program should be complete and efficient in terms of tester time.
The big challenge is that most of these restrictions and most of the analysis tools around work on the post-synthesis netlist. There are two big problems with this. The first problem is that if changes are required to the netlist it is often difficult to work out how to change the RTL to get the “desired” change to the netlist and the only fix is to simply update the netlist, and accept that the RTL, the canonical design representation, is not accurate. The second problem is that the changes come very late in the design cycle and, as with all such unanticipated changes, can disrupt schedules and perhaps even performance.
Paradoxically, most of these changes would have been simple to have made had the DFT rule-checking been performed on the RTL instead of the netlist. The changes can then be implemented at the correct level in the design, and earlier in the design cycle when they are planned and so not disruptive.
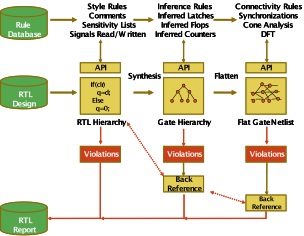
The challenge is that many of the DFT rules relate to specific architectures for scan chains but at the RTL level the scan chains have not yet been instantiated and will not be until much later in the design cycle. So to be useful, an RTL approach needs to first infer which chains will exist without the expensive process of instantiating them and hooking them all up. A second problem is that the various test modes alter how the clocks are generated and distributed (most obviously to the various scan chains etc). And a third issue is that test tools such as fault simulators required completely predictable circuit behavior. Bus contention or race conditions can create non-deterministic behavior which must be avoided. None of these three problems can be addressed by a simple topological analysis of the RTL.
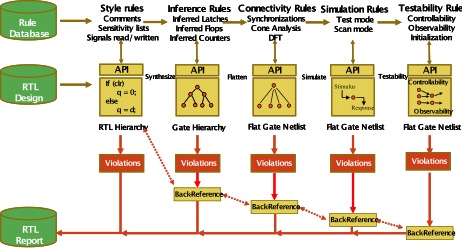
Instead a look-ahead architecture is required that predicts how the suite of test tools will behave and can then check that all the rules will pass. This can be done using a very fast sythesis to produce a generic hierarchical netlist, but with enough fidellity to allow checks such as latch detection. The netlist can then be flattened for fast checking of topological rules like combinational loop detection. This approach allows for DFT rule-checking to be done even before the block or design runs through synthesis, including accurately estimating the test coverage and so avoiding a scramble late in the design cycle to improve an inadequate coverage.
The Atrenta SpyGlass-DFT white paper can be downloaded here.
Share this post via:



Things From Intel 10K That Make You Go …. Hmmmm