
I mentioned a while back that I’m really getting into the role that sensors play in our new hyper-connected world – in the IoT, intelligent cars, homes, cities, industry, utilities, medicine, agriculture, etc, etc. If we can think of a way to sense it and connect it, someone is probably already doing it. But there’s more to these devices at the edge than sensing. One of the really neat things about MEMS is that you also can build machines – actuators – at the micro-level, delivering a breathtaking range of possibilities, already used in camera autofocus, laser-based 3D scanning using micro-mirrors, the tiny speakers in earbuds, pumps for biomedical analysis and many other applications.
These machines can get pretty complicated so John Stabenow (Mentor/Tanner) and Mary Ann Maher (SoftMEMS) eased me into it with a simple example – a thermal actuator, a device which causes an arm to bend (in this example) thanks to thermal expansion due to resistive heating. These are not toy examples; such devices have multiple real uses, to tilt micro mirrors for barcode reading or biomedical imaging, to tune lasers and to control adaptive optics for sight correction.
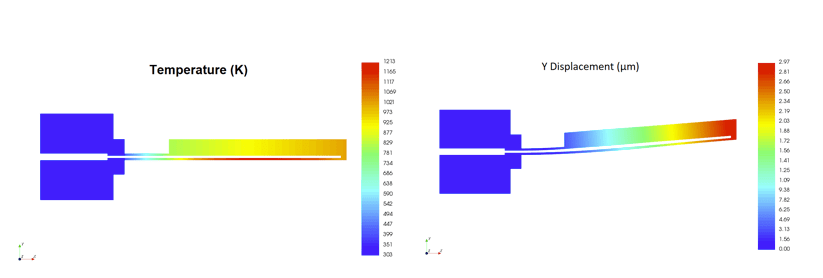
The idea is not difficult to understand. Two pads (blue above) are anchored to the substrate, and from these extend two arms, one narrow and one mostly wide (though it starts narrow, to not impede flexing I would guess). These arms are connected together at the far end. Now apply a voltage across the pads. Current flows through the arms, resistively heating each; obviously the narrow arm heats up more (higher resistance) and expands more than the wide arm. Since they’re connected at the far end, the structure bends upwards. Presto – you have a micro-machine with an arm which will bend upwards when you apply a voltage across the pads.
An interesting point here is that the design of these devices is pretty unconstrained. Where conventional semiconductor devices follow well-defined recipes and rules, teams who build these kinds of devices can up to a point do whatever they want, as long as their MEMS foundry is willing to support them. I’ve seen examples using polymers as part of the arm structure, rather than polysilicon, for preferable characteristics in bending at lower voltages. Less dramatically, all dimensions and materials (typically less exotic) are completely open for experimentation.
Clearly this means that design must be tested through a lot of virtual prototyping and analysis, though here that prototyping and analysis uses tools that wouldn’t look out of place in turbine design – drafting, 3D modeling and finite element analysis (FEA) of thermal and mechanical behaviors.
Mentor/Tanner, SoftMEMS and OnScale have partnered to provide a front-to-back solution for this prototyping. Tanner provide the tools to define parametrizable structures, a layer at a time. SoftMEMS converts this to 3D-models, given additional input on material choices and other parameters. OnScale then provides cloud-based FEA for elastic scalability in thermal and mechanical analyses. The results are directly viewable back in the Mentor and SoftMEMS tools.
The flow is setup so that you can easily run multiple trials in parallel to compare and contrast different options. The Tanner tools allow for parametrization with no need for coding in some cases, and with an option to code in more complex cases. Using these capabilities, you can parametrize the length of the actuator arms for example. Parameterized structures are called T-cells (think of them as a type of P-cell). SoftMEMS understands T-cells so can carry these through in 3D-modeling to generate multiple variants for prototyping analysis.
You might be thinking at this point (because I was) “OK, all very good and necessary, but how do I know that simulated behavior will correlate with manufactured behavior? Geometries and physical properties (resistance, thermal expansion coefficients, stiffness) can all be influenced by defects and manufacturing variability.
When you’re building regular semiconductors, you have access to PDKs with lots of rules, primitive devices and P-cells, all qualified by the foundry. These are what you rely on to know that your analysis of your design will correspond reasonably with what is finally built.
John and Mary Ann told me that the state of this art is not so advanced for MEMS, in part because of the huge variability in design of these devices, also because foundries, customers and tool makers are still figuring out how best to optimize yields. Currently it is typical to correlate 3D models with as-processed devices and to do statistical simulations to model variation so that they can develop reasonable correspondences between modeling and manufacturing.
This enables some platforms to offer PDKs for a stable range of cell types; however it is still necessary to support customers who want to experiment outside those constraints. This team finds in such cases that it is best to work with the foundry and customers to build PDKs on-the-fly to suit that customer’s special needs. Mary Ann cited both Bosch and ST as examples where this is quite common. She believes the Mentor-Tanner/SoftMEMS/OnScale partnership is differentiated from other prototyping options through it’s strengths in supporting such flows.
Very cool technology. I’m hoping to write about more examples over time. You can learn more about the collaboration HERE.
Share this post via:



Comments
There are no comments yet.
You must register or log in to view/post comments.