
As a significant part of our life is spent in travelling, it’s natural that automotive sector continues to get traction with a significant push towards electronics and automated solutions for automobiles such as cars to provide safety, comfort and entertainment. These solutions are provided by complete systems which operate based on electrical signals, sensors, actuators and complete control units. There can be multiple systems in a car to control several operations which can be of different natures such as mechanical, thermal, fluidic etc. These systems need to work with very high accuracy and performance and hence need dedicated environment for their development which can also take into account their surroundings. It’s not always possible to have the real hardware environment to develop and test them. As I have been an advocate of virtual methods of doing several complex tasks which could be very costly and time consuming to do in real environment, the AUTOSAR (Automotive Open System Architecture) Software development has again caught my attention of how powerful it is to develop the automotive systems on Virtual Platform.
I recently attended a webinarpresented very nicely by Lance Brooks of Mentor Graphicswhere he provided a good introduction about VSI (a virtual development environment for AUTOSAR Software systems), explained its core features for system modeling through an example of Virtual ECU (Electronic Control Unit) and provided details about analyzing trace results (collected during execution) to solve problems. He provided good demonstrations on each part of the presentation with real life examples.
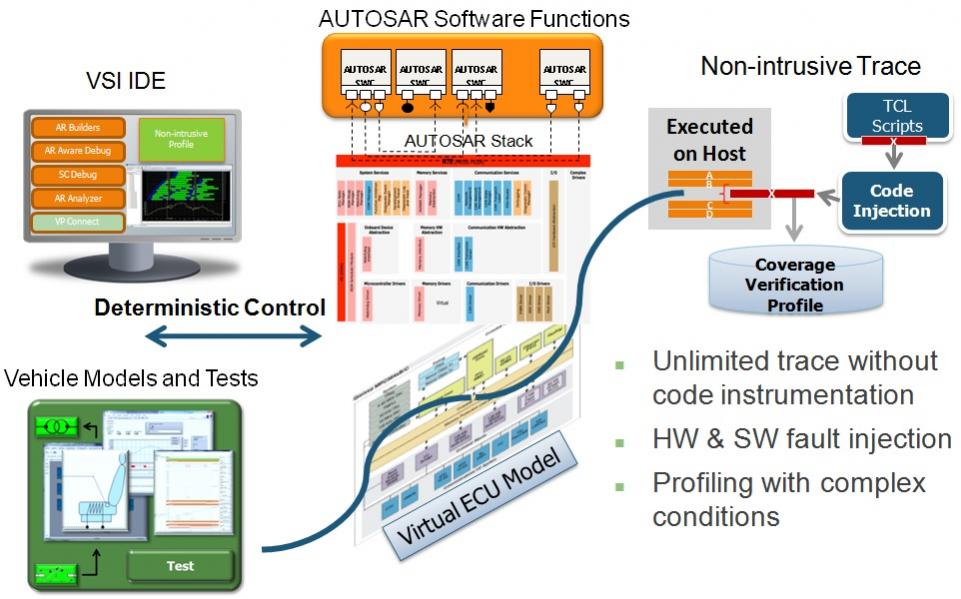
VSI includes a powerful set of tools to provide a virtual environment for AUTOSAR-aware editing, building, integrating, analyzing and debugging AUTOSAR software systems. The builders automate configuration, code generation and compilation of code and a powerful debugger allows software execution in the context of AUTOSAR for users to interact with it setting breakpoints, stepping, inspecting variables etc. as desired. The execution results can be traced through without any limit on trace depth in a non-intrusive way. This environment allows you to connect a Virtual ECU to real verification, calibration and other tools like vehicle network testers without needing the real hardware. Your actual AUTOSAR functions execute against real AUTOSAR BSW (basic s/w), including the OS, RTE (Runtime Env), MCAL (Microcontroller Abstraction Layer), memory and diagnostic services, I/O drivers and other basic s/w services.

The above image shows an integrated development environment (IDE) of VSI which is used to deterministically control the Virtual ECU hardware model in order to execute software. Since the Virtual ECU is the model of an actual ECU including the embedded processor, it can be simulated and optimized for performance of your final ECU software, thus solving problems that can be very difficult to solve in actual hardware environment. The verification is powered by unlimited execution trace depth and complex trace conditions and supported by hardware and software fault injection to measure and analyze performance of your software under adverse conditions. Additional tools and technologies are provided for you to quickly integrate your application software and connect the Virtual ECU to your vehicle models and verification suites. A brief demo (includes Getting Started tutorial that ships with VSI) in the webinar explains all these basic features in very nice way.
Mentor’s underlying simulation technology takes into account the embedded processor and peripheral behavior during software execution that portrays the Virtual Platform in place of real hardware; actual target processor compiler and accurate model of the processor core, bus architecture, memory, and surrounding hardware peripherals are used while simulating instructions. Since it is accurate, it can be used as real hardware and since it is fast, complete application software and AUTOSAR BSW can be executed on the platform.
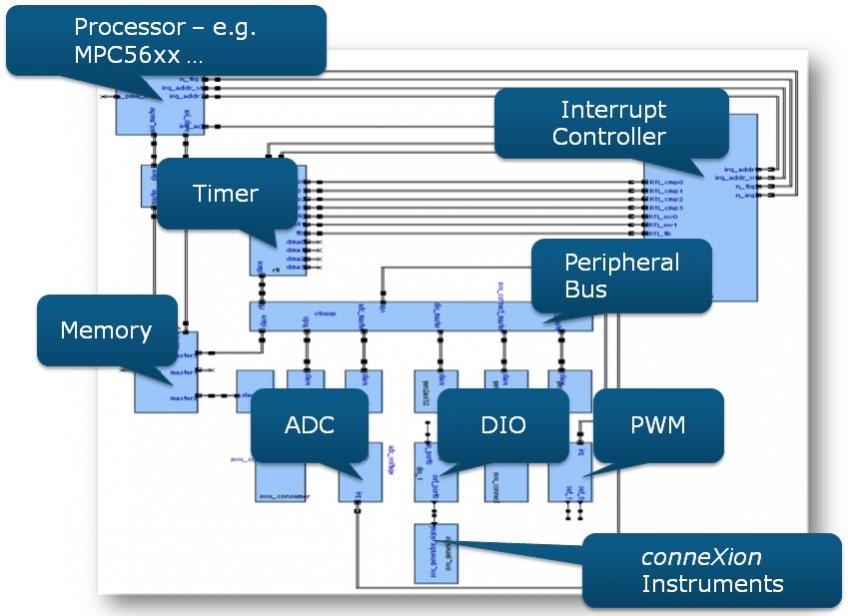
Above is an example of Virtual ECU hardware with bus model connecting memory and peripherals and processor model. The conneXion instruments are used to connect external components such as virtual sensors, actuators, and other vehicle hardware.
VSI includes actual target version of Volcano[SUP]TM[/SUP] VSTAR BSWwhich has AUTOSAR-Compliant OS, RTE, Services, MCAL and ECU Abs (I/O) Firmware. Cross-target C/C++ software development tools are used to compile code to execute on it. The advantages of Virtual hardware is that it is always available enabling early validation, it provides complete ECU visibility for both hardware and software, full non-intrusive trace without affecting behaviour of the system, and accurate timing.
In the webinar, there is a great demonstration of a full seat heater control system of a car which executes on Mentor’s Vista Virtual Prototype. The software executes on top of VSTAR BSW that is ported to the Virtual ECU. The Virtual ECU is connected to a model of the seat heater hardware through VSI’s conneXion technology which is also used to connect automated tests.
A unique and powerful feature of VSI is the ability to trace complete results collected during execution, visualize them, analyze and solve problems.
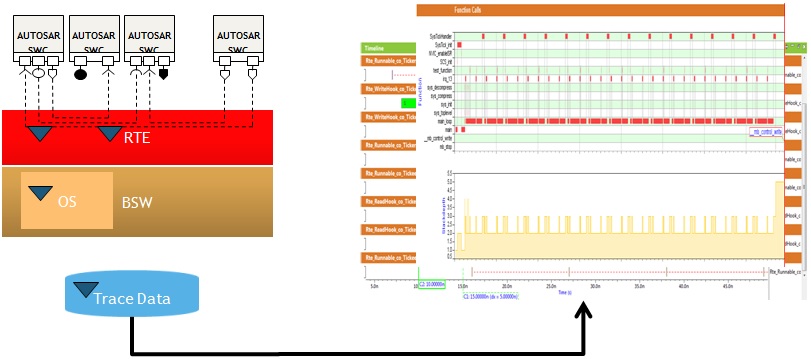
VSI’s Sourcery Analyzer real-time analysis technology (which is non-intrusive) includes agents that crunch trace results to compute answers and otherwise help visualize vehicle software in an AUTOSAR-aware manner. It provides simultaneous real-time hardware and software trace for system-wide analysis with unlimited trace depth and complex conditioning. Again an interesting demo has been provided in the webinar on this real-time analysis of the seat heater control system where various parameters such as temperature rise time, average value of temperature etc. can be computed.
VSI enables software developers to start early without dependencies on complex, shared, hardware-based development environment and complete system integration and function validation much earlier. It is interoperable with popular test and validation tools for its wider applicability. To know more and witness interesting demos, attend the webinar here.
Read more on Vista Virtual Prototyping and Sourcery Analyzer –
Develop A Complete System Prototype Using Vista VP
Debugging Complex Embedded System – How Easy?
More Articles by PawanFangaria…..
Share this post via:



Comments
There are no comments yet.
You must register or log in to view/post comments.