I’m watching the latest Mars rover landing tonight called “Curiosity” and wondering about all of the electronic systems designed to control the project and hopefully send back some stunning new images along with new data on the micro-biology and chemistry of the red planet. JPL gets all the glory for designing and building this mission, however without EDA tools used in the design of electronics none of this planetary exploration would be possible.
I recall that the last Mars rover had some chips designed with Tanner EDA tools, however with Curiosity I haven’t heard of any specific EDA vendor tools being used during the design process. That provides me some impetus to do more investigating so I will blog about what I learn on their use of EDA tools.
Let’s take a look at some of the electronic systems used for Curiosity:
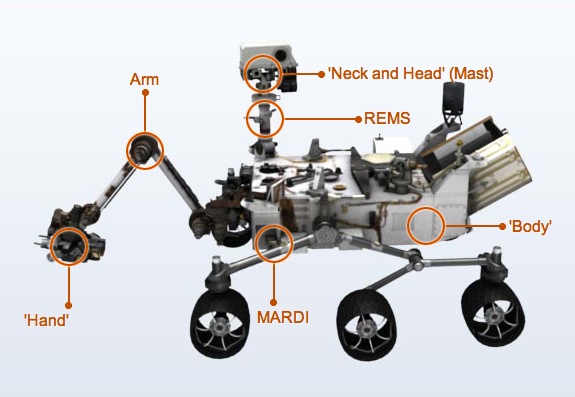
MARDI – MARS Descent Imager
- Main Function: Take pictures during descent through Martian atmosphere
- Location: Mounted on the fore-port-side of the rover, pointing toward the ground
- Memory: 8 Gigabyte flash memory storage allows over 4,000 raw frames
- HD Video: four color frames per second; close to 1,600 X 1,200 pixels per frame
- Other: Thumbnails and a few sample frames expected a few days after landing
- Image sensor from Truesense Imaging, 2 megapixel CCD also used on MAHLI and MastCam.

REMS – Rover Environmental Monitoring Station
- Main Function: Weather Station
- Location:
-
- two “bolt-like” booms on the rover’s mast (“neck”) that measure wind, ground temperature and humidity
- UV sensor on the rover deck (“back”) about 1.5 meters above ground level
- pressure sensor inside the rover body and connected to the external atmosphere via a tube that exits the rover body through a small opening with protection against dust deposition
- Capability: Designed to survive a -130 °C to +70 °C temperature range and minimize power consumption for operation
- Measurements: autonomously record at least 5 minutes of data at 1 Hz each hour, every sol (Martian day), for all sensors (i.e., total baseline of two hours per sol); maximum of three hours of operation per sol allows a continuous block of monitoring time if desired

Mast
- Main Function: to give the rover a human-scale view through cameras and to allow it remote-sensing capabilities
- Height: about seven feet from the ground

A top view of Curiosity:
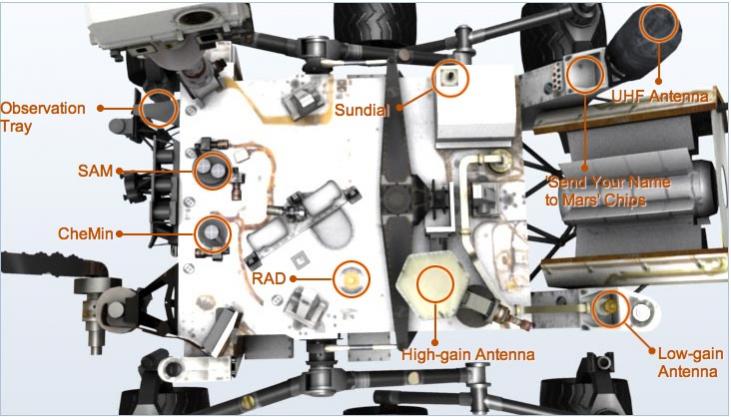
UHF Antenna
- Main Function: Transmitting Data to Earth through Mars Orbiters
- Radio Frequency: ultra-high frequency (UHF) band (about 400 megahertz)

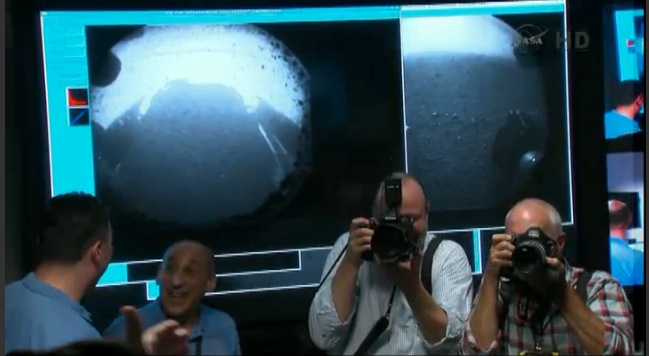
The Landing
Watching the live video feed from Nasa I saw the entire room of engineers erupt into tremendous applause as the automated landing happened and instrumentation numbers were streaming in.
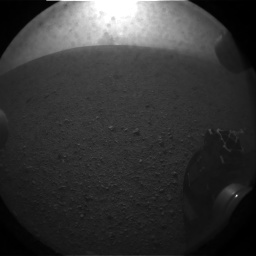
Small thumbnail images were shown on the screen within minutes of landing, 16×16 pixels, then 256×256 pixels.
Low-gain Antenna
- Main Function: Receiving Data
- Radio Frequency: X band (7 to 8 gigahertz).

High-gain Antenna
- Main Function: Transmitting or Receiving Data
- Location: Mounted mid-aft-port-side of Curiosity’s deck (“back”)
- Size: hexagonally shaped 1 foot (0.3 meters) in diameter
- Transmission Rates: 160 bits per second or faster to the Deep Space Network’s 112-foot-diameter (34-meter-diameter) antennas or at 800 bits per second or faster to the Deep Space Network’s 230-foot-diameter (70-meterdiameter)
- Provided by: Spain
Names Etched on Chips
- Main Function: Carry the hopes and aspirations of Earth’s peoples to Mars, more than 1.24 million names submitted online
- Location: Curiosity’s deck (“back”)
- Size: Each chip is about the size of a dime
Back View of Curiosity:
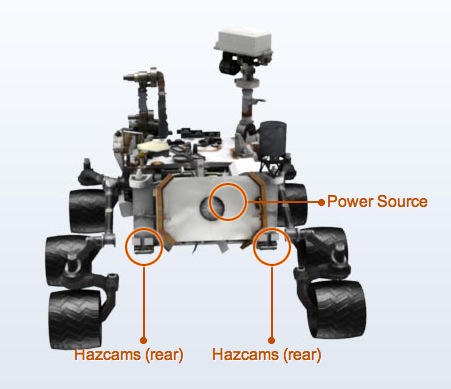
Hazcams – Hazard Avoidance Cameras
- Main Function: Aid in autonomous navigation and obstacle avoidance
- Location: Mounted at the front and rear of the rover’s body, pointing down toward the ground, about 27 inches (68 centimeters) above ground; front: about 6.54 inches between the center of left and right eyes; back: 3.9 inches (10 centimeters), about 31 inches (78 centimeters) above ground level
- Weight: about 9 ounces (250 grams) apiece
- Grayscale: cover red wavelengths centered at ~650 nanometers
- Image Size: 1024 X 1024 pixels
- Image Resolution: 2.1 milliradians per pixel
- Focal Length: in focus about 4 inches (10 centimeters) to infinity
- Focal Ratio and Field of View: Fisheye lens with nd 124° square
- Other: Each has a one-time-removable lens cover to shield from dust kicked up at landing

Navcams – Navigational Cameras
- Main Function: Aid in autonomous navigation
- Location: Mounted at the front and rear of the rover’s body, pointing down toward the ground; left and right “eyes” in each set are about 16.5 inches (42 centimeters) apart
- Weight: about 9 ounces (250 grams) apiece
- Grayscale: cover red wavelengths centered at ~650 nanometers
- Image Size: 1,024 by 1,024 pixels
- Image Resolution: 0.82 milliradians per pixel
- Focal Length: in focus from 20 inches (0.5 meter) to infinity
- Focal Ratio and Field of View: fixed-aperture f/12 and 45° square; field of view is similar to a 37-mm lens on a 35mm camera

Summary
I saw the same excitement inside of JPL as any Olympic sporting event in London, and with that a lot of engineering pride in a complex project executing per design. The unsung hero of this Mars triumph are the EDA tools and IC designers that made the sophisticated electronic systems, hardware and software all work together perfectly.





Chemical Origins of Environmental Modifications to MOR Lithographic Chemistry