You are currently viewing SemiWiki as a guest which gives you limited access to the site. To view blog comments and experience other SemiWiki features you must be a registered member. Registration is fast, simple, and absolutely free so please,
join our community today!
SLAM – simultaneous localization and mapping – is already a well-established technology in robotics. This generally starts with visual SLAM, using object recognition to detect landmarks and obstacles. VSLAM alone uses a 2D view of a 3D environment, challenging accuracy; improvements depend on complementary sensing inputs… Read More
Being engrossed in the digital information world, it is easy to forget that the real world is comprised of mostly analog signals and data. Digital Signal Processors (DSP) take digitized forms of these worldly signals and manipulate them mathematically. Although floating-point is a more relevant and accurate way of representing… Read More
Vision pipelines, from image signal processing (ISP) through AI processing and fancy effects (super-resolution, Bokeh and others) has become fundamental to almost every aspect of the modern world. In automotive safety, robotics, drones, mobile applications and AR/VR, what we now consider essential we couldn’t do without… Read More
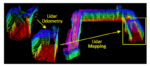
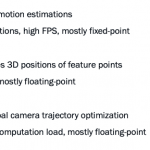
SLAM – simultaneous localization and mapping – is critical for mobile robotics and VR/AR headsets among other applications, all of which typically operate indoors where GPS or inertial measurement units are either ineffective or insufficiently accurate. SLAM is a chicken and egg problem in which the system needs to map its environment… Read More
Google’s Project Tango is a prime example of a sophisticated application pushing the boundaries of what is possible within the power envelope of a mobile device. Its objective is to combine 3D motion tracking with depth sensing to understand how a device is moving and gauge its surroundings precisely.… Read More