You are currently viewing SemiWiki as a guest which gives you limited access to the site. To view blog comments and experience other SemiWiki features you must be a registered member. Registration is fast, simple, and absolutely free so please,
join our community today!
SLAM – simultaneous localization and mapping – is critical for mobile robotics and VR/AR headsets among other applications, all of which typically operate indoors where GPS or inertial measurement units are either ineffective or insufficiently accurate. SLAM is a chicken and egg problem in which the system needs to map its environment… Read More
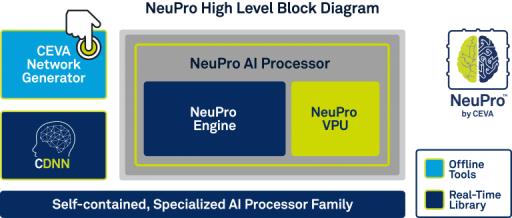
AI is quickly becoming the new killer app and everyone is piling on board as fast as they can. But there are multiple challenges for any would-be AI entrepreneur:
- Forget about conventional software development; neural nets require a completely different infrastructure and skill-sets
- More and more of the interesting opportunity
…
Read More